Fitting the KAGRA Typical LVDT and and Geophone noise with Transfer Function¶
For LVDT and geophone noise, we assume their amplitude spectral densities (ASDs) follows the empirical model
Here’re some typical values for LVDTs and Geophones
| Sensor | \(n_a\) | \(n_b\) | \(a\) | \(b\) |
|---|---|---|---|---|
| LVDT | 1e-2.07 | 1e-2.3 | 0.5 | 0 |
| Geophone | 1e-5.46 | 1e-5.23 | 3.5 | 1 |
In this tutorial, we will demonstrate the use of kontrol.curvefit.CurveFit for fitting a transfer function for noise amplitudes. The fitted noise models will be exported and be used in the complementary filter tutorial. To Fit the noise with a transfer function, we use a ZPK model kontrol.curvefit.model.SimpleZPK as an intermediate step. The benefit of using a ZPK model is that the bounds are specifiable, i.e. the bounds of the frequency axis, so a global optimization scheme, i.e.
scipy.optimize.differential_evolution(), can be used. After obtaining a ZPK model, it’s converted to the polynomial transfer function format and it’s numerator and denominator are used for a final local fit using a transfer function model kontrol.curvefit.model.TransferFunctionModel() and a local minimization scheme scipy.optimize.minimize("method"="Nelder-Mead", ...) to obtain the final parameters of the transfer functions. We negate any unstable zeros and poles in the final
transfer functions and they are exported to "noise_lvdt.pkl" and "noise_geophone.pkl", which can be read with kontrol.load_transfer_function().
[1]:
# Let's define the sensor noises
import numpy as np
import matplotlib.pyplot as plt
def model(f, na, nb, a, b):
return np.sqrt((na/f**a)**2 + (nb/f**b)**2)
# f = np.linspace(0.001, 100, 102400)
# For the sake of demostration, use logspace. It's easier
f = np.logspace(-3, 2, 10240)
n_lvdt = model(f, na=1*10**-2.07, nb=1*10**-2.3, a=0.5, b=0)
n_geophone = model(f, na=1*10**-5.46, nb=1*10**-5.23, a=3.5, b=1)
n_lvdt_pad = np.array(n_lvdt)
n_geophone_pad = np.array(n_geophone)
[2]:
# Make the noise flat at lower and higher frequencies so it works with h-infinity synthesis.
# Pad before f_lower and after f_upper
f_lower = 0.01
f_upper = 10
n_lvdt_lower_val = n_lvdt[f>f_lower][0]
n_lvdt_upper_val = n_lvdt[f<f_upper][-1]
n_lvdt_pad[f<f_lower] = n_lvdt_lower_val
n_lvdt_pad[f>f_upper] = n_lvdt_upper_val
n_geophone_lower_val = n_geophone[f>f_lower][0]
n_geophone_upper_val = n_geophone[f<f_upper][-1]
n_geophone_pad[f<f_lower] = n_geophone_lower_val
n_geophone_pad[f>f_upper] = n_geophone_upper_val
[3]:
# Let's plot the noises
plt.figure(figsize=(6, 4))
plt.rcParams["font.size"] = 12
plt.loglog(f, n_lvdt, lw=3, label="LVDT noise")
plt.loglog(f, n_lvdt_pad, "--", lw=3, label="LVDT noise padded")
plt.loglog(f, n_geophone, lw=3, label="Geophone noise")
plt.loglog(f, n_geophone_pad, "--", lw=3, label="Geophone noise padded")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel(r"Amplitude Spectral Density ($\mu \rm{m}/\sqrt{\rm{Hz}}$)")
plt.xlabel("Frequency (Hz)")
plt.show()

Define a cost funtion
[4]:
def cost(args, model, xdata, ydata, *model_args, **kwargs):
fit = abs(model(xdata, args))
return np.mean((np.log10(ydata) - np.log10(fit))**2)
[5]:
# Let's fit them with ZPK model using scipy.optimize.differential_evolution
# Let's choose a third-order model for LVDT and a fourth-order model for geophone
import scipy.optimize
import kontrol.curvefit
log_args = True # Fit the logarithm of the arguments instead.
lvdt_order = 3
lvdt_model = kontrol.curvefit.model.SimpleZPK(nzero=lvdt_order, npole=lvdt_order, log_args=log_args)
lvdt_fit = kontrol.curvefit.CurveFit()
lvdt_fit.xdata = f
lvdt_fit.ydata = n_lvdt_pad
lvdt_fit.cost = cost
lvdt_fit.optimizer = scipy.optimize.differential_evolution
lvdt_bounds = [(min(f), max(f))]*lvdt_order*2 # zeros and poles
lvdt_bounds.append((min(n_lvdt_pad)/10, max(n_lvdt_pad)*10)) # gain
if log_args:
lvdt_bounds = [(np.log10(min(f)), np.log10(max(f)))]*lvdt_order*2
lvdt_bounds.append((np.log10(min(n_lvdt_pad)/10), np.log10(max(n_lvdt_pad)*10))) # gain
lvdt_fit.optimizer_kwargs = {
"workers": -1,
"updating": "deferred",
"bounds": lvdt_bounds,
}
lvdt_fit.model = lvdt_model
res_lvdt = lvdt_fit.fit()
[6]:
log_args = True # Fit the logarithm of the arguments instead.
geophone_order = 4
geophone_model = kontrol.curvefit.model.SimpleZPK(nzero=geophone_order, npole=geophone_order, log_args=log_args)
geophone_fit = kontrol.curvefit.CurveFit()
geophone_fit.xdata = f
geophone_fit.ydata = n_geophone_pad
geophone_fit.cost = cost
geophone_fit.optimizer = scipy.optimize.differential_evolution
geophone_bounds = [(min(f), max(f))]*geophone_order*2 # zeros and poles
geophone_bounds.append((min(n_geophone_pad)/10, max(n_geophone_pad)*10)) # gain
if log_args:
geophone_bounds = [(np.log10(min(f)), np.log10(max(f)))]*geophone_order*2
geophone_bounds.append((np.log10(min(n_geophone_pad)/10), np.log10(max(n_geophone_pad)*10))) # gain
# print(1)
geophone_fit.optimizer_kwargs = {
"workers": -1,
"updating": "deferred",
"bounds": geophone_bounds,
}
geophone_fit.model = geophone_model
res_geophone = geophone_fit.fit()
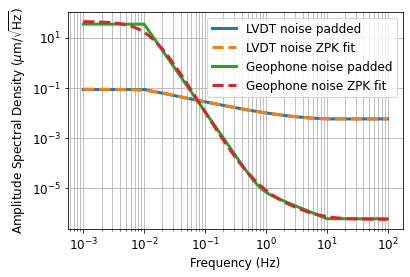
[7]:
# Inspect the fit
plt.figure(figsize=(6, 4))
plt.loglog(f, n_lvdt_pad, lw=3, label="LVDT noise padded")
plt.loglog(f, abs(lvdt_fit.model(f, lvdt_fit.optimized_args)), "--", lw=3, label="LVDT noise ZPK fit")
plt.loglog(f, n_geophone_pad, lw=3, label="Geophone noise padded")
plt.loglog(f, abs(geophone_fit.model(f, geophone_fit.optimized_args)), "--", lw=3, label="Geophone noise ZPK fit")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel(r"Amplitude Spectral Density ($\mu \rm{m}/\sqrt{\rm{Hz}}$)")
plt.xlabel("Frequency (Hz)")
plt.show()
[8]:
# Extract the numerator and denominators as inital guess for a transfer function fit.
lvdt_num = lvdt_fit.model.tf.minreal().num[0][0]
lvdt_den = lvdt_fit.model.tf.minreal().den[0][0]
geophone_num = geophone_fit.model.tf.minreal().num[0][0]
geophone_den = geophone_fit.model.tf.minreal().den[0][0]
lvdt_x0 = np.append(lvdt_num, lvdt_den)
geophone_x0 = np.append(geophone_num, geophone_den)
[9]:
lvdt_model = kontrol.curvefit.model.TransferFunctionModel(
nzero=lvdt_order, npole=lvdt_order, log_args=log_args)
lvdt_fit.optimizer = scipy.optimize.minimize
lvdt_fit.optimizer_kwargs = {
"method": "Nelder-Mead",
"x0": lvdt_x0 if not log_args else np.log10(lvdt_x0),
"options": {
"maxiter": len(lvdt_x0)*1000,
"adaptive": True,
}
}
lvdt_fit.model = lvdt_model
res_lvdt = lvdt_fit.fit()
[10]:
geophone_model = kontrol.curvefit.model.TransferFunctionModel(
nzero=geophone_order, npole=geophone_order, log_args=log_args)
geophone_fit.optimizer = scipy.optimize.minimize
geophone_fit.optimizer_kwargs = {
"method": "Nelder-Mead",
"x0": geophone_x0 if not log_args else np.log10(geophone_x0),
"options": {
"maxiter": len(geophone_x0)*1000,
"adaptive": True,
}
}
geophone_fit.model = geophone_model
res_geophone = geophone_fit.fit()
[11]:
# Inspect the fit
plt.figure(figsize=(6, 4))
plt.loglog(f, n_lvdt_pad, lw=3, label="LVDT noise padded")
plt.loglog(f, abs(lvdt_fit.model(f, lvdt_fit.optimized_args)), "--", lw=3, label="LVDT noise TF fit")
plt.loglog(f, n_geophone_pad, lw=3, label="Geophone noise padded")
plt.loglog(f, abs(geophone_fit.model(f, geophone_fit.optimized_args)), "--", lw=3, label="Geophone noise TF fit")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel(r"Amplitude Spectral Density ($\mu \rm{m}/\sqrt{\rm{Hz}}$)")
plt.xlabel("Frequency (Hz)")
plt.show()

[12]:
# Get the fitted transfer functions and "stablize" the poles and zeros.
lvdt_fit.model.args = lvdt_fit.optimized_args
lvdt_tf = lvdt_fit.model.tf
geophone_fit.model.args = geophone_fit.optimized_args
geophone_tf = geophone_fit.model.tf
lvdt_tf = kontrol.TransferFunction(lvdt_tf)
geophone_tf = kontrol.TransferFunction(geophone_tf)
# Negate unstable zeors and poles
lvdt_tf.stabilize()
geophone_tf.stabilize()
# Export
lvdt_tf.save("noise_lvdt.pkl")
geophone_tf.save("noise_geophone.pkl")