Algorithmic Post-Filtering¶
In this tutorial, we will demonstrate the use of kontrol.regulator.post_filter to add notch filters and low-pass filters as post-filters for post-regulator designs.
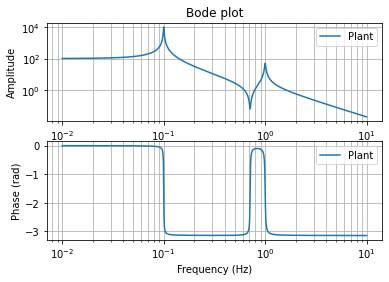
We will inherit the a similar oscillatory plant from the “Algorithmic Control Design for Oscillator-Like Systems” tutorial. In the plant, there’re two oscillatory mode, one at 0.1 Hz and another at 1 Hz.
[1]:
import numpy as np
import control
import matplotlib.pyplot as plt
import kontrol.regulator
## define the plant here
s = control.tf("s")
g1 = 100
w1 = 0.1 * (2*np.pi)
q1 = 100
g2 = 1
w2 = 1 * (2*np.pi)
q2 = 50
plant = g1*w1**2 / (s**2 + w1/q1*s + w1**2) + g2*w2**2 / (s**2 + w2/q2*s + w2**2)
f = np.logspace(-2, 1, 1000)
plt.figure(figsize=(6, 4))
plt.subplot(211, title="Bode plot")
plt.loglog(f, abs(plant(1j*2*np.pi*f)), label="Plant")
plt.ylabel("Amplitude")
plt.xlabel("Frequency (Hz)")
plt.legend(loc=0)
plt.grid(which="both")
plt.subplot(212)
plt.semilogx(f, np.angle(plant(1j*2*np.pi*f)), label="Plant")
plt.ylabel("Phase (rad)")
plt.xlabel("Frequency (Hz)")
plt.legend(loc=0)
plt.grid(which="both")
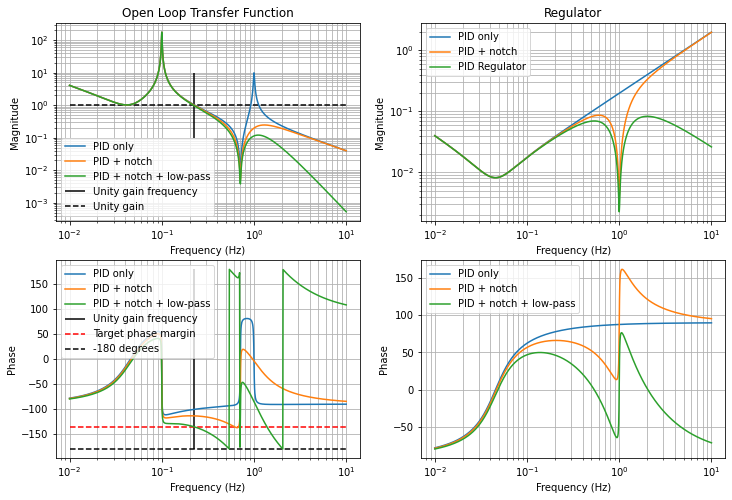
Suppose we don’t want to damp the 3 rad/s mode and we would like to add a second-order low-pass filter to filter high frequency noise (Which doesn’t exist in this tutorial but may exist in real systems).
We can use kontrol.regulator.post_filter.post_notch() to create a list of notch filters that completely cancels the poles that we don’t want to damp. We need to specify the plant, the regulator, and notch_peaks_above parameters. notch_peaks_above specifies the frequency threshold (in Hz). kontrol.regulator.post_filter.post_notch() will return a list of notch filters to cancel modes above notch_peaks_above.
We can use kontrol.regulator.post_filter.post_low_pass() optimize a low-pass filter according to a specified phase margin (default 45 degrees). We need to specify the plant, the regulator, any post_filters such as the notches, and optionally, ignore_ugf_above parameters. The function will optimize a cutoff frequency of a low-pass filter to make all unity gain frequencies (UGFs) lower than ignore_ugf_above to meet the specified phase margin. If this is not specified, all
UGFs are taken into account. UGFs that are originally lower than the phase margin will be ignored. The low-pass filter is defaulted to be kontrol.regulator.predefined.low_pass(), which is a simple \(n^\mathrm{th}\)-order low-pass filter.
[2]:
# Make regulator here
regulator = kontrol.regulator.oscillator.pid(plant, regulator_type="PID")
notch_peaks_above = 2 / (2*np.pi) # We want to notch the 3 rad/s mode
ignore_ugf_above = None # Let's just not ignore anything.
notch_list = kontrol.regulator.post_filter.post_notch(
plant, regulator, notch_peaks_above=notch_peaks_above)
notch = np.prod(notch_list) # Combine all notch filters
kwargs = {"order": 2} # keyword arguments for kontrol.regulator.predefined.low_pass. We want 2nd-order low-pass.
low_pass = kontrol.regulator.post_filter.post_low_pass(
plant, regulator, post_filter=notch, ignore_ugf_above=ignore_ugf_above, **kwargs)
oltf = regulator * plant
oltf_notch = regulator * plant * notch
_, pms, _, _, ugf, _ = control.stability_margins(oltf_notch, returnall=True)
# print(ugf/2/np.pi)
# print(pms)
oltf_notch_lp = regulator * plant * notch * low_pass
plt.figure(figsize=(12, 8))
plt.subplot(221)
plt.title("Open Loop Transfer Function")
plt.loglog(f, abs(oltf(1j*2*np.pi*f)), label="PID only")
plt.loglog(f, abs(oltf_notch(1j*2*np.pi*f)), label="PID + notch")
plt.loglog(f, abs(oltf_notch_lp(1j*2*np.pi*f)), label="PID + notch + low-pass")
plt.vlines(ugf/2/np.pi, 0.1, 10, color="k", label="Unity gain frequency")
plt.hlines(1, min(f), max(f), ls="--", color="k", label="Unity gain")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel("Magnitude")
plt.xlabel("Frequency (Hz)")
plt.subplot(222)
plt.title("Regulator")
plt.loglog(f, abs(regulator(1j*2*np.pi*f)), label="PID only")
# plt.loglog(f, abs((notch)(1j*2*np.pi*f)), label="Notch")
# plt.loglog(f, abs((low_pass)(1j*2*np.pi*f)), label="Low-pass")
plt.loglog(f, abs((regulator*notch)(1j*2*np.pi*f)), label="PID + notch")
plt.loglog(f, abs((regulator*notch*low_pass)(1j*2*np.pi*f)), label="PID Regulator")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel("Magnitude")
plt.xlabel("Frequency (Hz)")
plt.subplot(223)
plt.semilogx(f, 180/np.pi*np.angle(oltf(1j*2*np.pi*f)), label="PID only")
plt.semilogx(f, 180/np.pi*np.angle(oltf_notch(1j*2*np.pi*f)), label="PID + notch")
plt.semilogx(f, 180/np.pi*np.angle(oltf_notch_lp(1j*2*np.pi*f)), label="PID + notch + low-pass")
plt.vlines(ugf/2/np.pi, -180, 180, color="k", label="Unity gain frequency")
plt.hlines(-135, min(f), max(f), ls="--", color="r", label="Target phase margin")
plt.hlines(-180, min(f), max(f), ls="--", color="k", label="-180 degrees")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel("Phase")
plt.xlabel("Frequency (Hz)")
plt.subplot(224)
plt.semilogx(f, 180/np.pi*np.angle(regulator(1j*2*np.pi*f)), label="PID only")
plt.semilogx(f, 180/np.pi*np.angle((regulator*notch)(1j*2*np.pi*f)), label="PID + notch")
plt.semilogx(f, 180/np.pi*np.angle((regulator*notch*low_pass)(1j*2*np.pi*f)), label="PID + notch + low-pass")
plt.legend(loc=0)
plt.grid(which="both")
plt.ylabel("Phase")
plt.xlabel("Frequency (Hz)")
[2]:
Text(0.5, 0, 'Frequency (Hz)')